ピッチングマシンのボール姿勢回転の計測と制御
様々な球種を投げ分けられるピッチングマシン開発を目指した事例です。ボールをマシンにセットするとき、所望の姿勢が得られるよう、回転角の算出と制御を行うことを目的としました。
装置は、ボールの様子を撮影するカメラと、撮影した画像から回転角を算出する計算機で構成される「ボール姿勢計測部」、計測部で算出した角度に従って所望の姿勢にボールを回す「ボール姿勢制御部」の2つから成ります。制御部は装着が期待されていたため、計測部のみ開発しました。
撮影された画像について、まずボールの姿勢は、その縫い目によって完全に決定できるため、縫い目の認識が重要となります。また照明が一定とは限らないうえ、縫い目の色が一定ではないという特徴を有しています。
この条件のもと、以下のような手法を採用しました。
画像分解に基づいた縫い目認識:
画像の周波数成分によるエネルギー関数を作成し、最適化で画像分解して縫い目を抽出します。
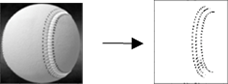
縫い目が「ガタガタ」の柄を持つ性質より画像分解します。照明にもカラーにも依存しない頑健な抽出手法です。
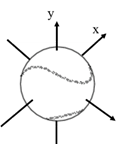
SVDによる姿勢判定:
特異値分解 SVD (singular value decomposition) による主軸の抽出と姿勢の判定を行います。
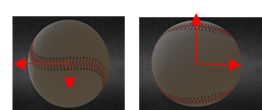
ボールは、2枚の瓢箪型の平面を直交で曲げ縫いたものであり、2つの平面が合同なので、XとY軸を回した回転は等価です。XYZの3軸回転は、XZ or YZの2軸回転に落とせるため、縫い目の特徴によって、X/Y軸の回転角とZ軸の回転角を算出することができます。
回転の決定:
異なる姿勢の遷移図を作成し、どのような回転であるかを決定します。
以上の1から3を繰り返し、少しずつ調整していきます。
回転角度の算出することで、マッチング系の手法より高速かつ容量の削減が可能となります。残念ながら実機での検証を行う段階にまで至りませんでしたが、カメラ1台で十分実現可能という評価結果を得ています。
線形代数との関わりもある大変興味深い分野であり、その後も継続して研究を続けています。
お問い合わせ
開発事例に興味がありましたら、お気軽にお問合せください。
下記お電話、または「お問い合わせ」からフォームにご記入ください。
株式会社ハイシンク創研 研究開発本部075-322-7088受付時間 9:00-18:00 [ 土・日・祝日除く ]
お問い合わせ